Unipolarni ali bipolarni koračni motorji – kateri so boljša izbira in zakaj?
Unipolarni ali bipolarni koračni motorji? V prispevku bomo opisali tako unipolarne kot bipolarne koračne motorje in razložili prednosti/slabosti obeh. Izbira vrste koračnega motorja je pomembna predvsem zato, ker zatem sledi nakup gonilnika koračnega motorja. Tudi ti se razlikujejo in običajno je bipolarni gonilnik (kot je Poscope PoStep25-256) bolj učinkovit od unipolarnega.
Pa poglejmo.
Unipolarni koračni motor
Unipolarni koračni motor deluje z enim navitjem s sredinskim ventilom na fazo. Vsak del navitja je vklopljen za vsako smer magnetnega polja. Vsako navitje je relativno preprosto s komutacijskim vezjem. To je možno zato, ker ima razporeditev magnetni pol, ki ga je mogoče obrniti brez preklopa smeri toka. V večini primerov, glede na fazo, je skupni sredinski ventil za vsako navitje naslednji – tri žice na fazo in šest kablov za običajni dvofazni koračni motor.
Običajno boste videli, da sta obe fazi pogosto povezani znotraj, zato ima koračni motor samo pet kablov. Pogosto se za aktiviranje pogonskih tranzistorjev v pravilnem vrstnem redu uporablja krmilnik koračnega motorja. Ker je te koračne motorje zelo enostavno upravljati, so pogosto zelo priljubljeni med ljubitelji in so običajno najcenejši način za natančne kotne premike.
Bipolarni koračni motor
Pri bipolarnih koračnih motorjih pride na eno fazo samo eno navitje. Pogonsko vezje mora biti bolj zapleteno, da se magnetni pol obrne, kar se izvede za obrnitev toka v navitju. To se naredi z razporeditvijo mostu H, vendar je mogoče kupiti več gonilnih čipov in s tem poenostaviti nalogo. Za razliko od unipolarnega koračnega motorja ima bipolarni koračni motor dva kabla na fazo, od katerih nobeden ni običajen. Učinki statičnega trenja se pojavljajo pri H mostz z določenimi topologijami pogona, vendar je to mogoče zmanjšati z razpršitvijo signala koračnega motorja pri višji frekvenci.
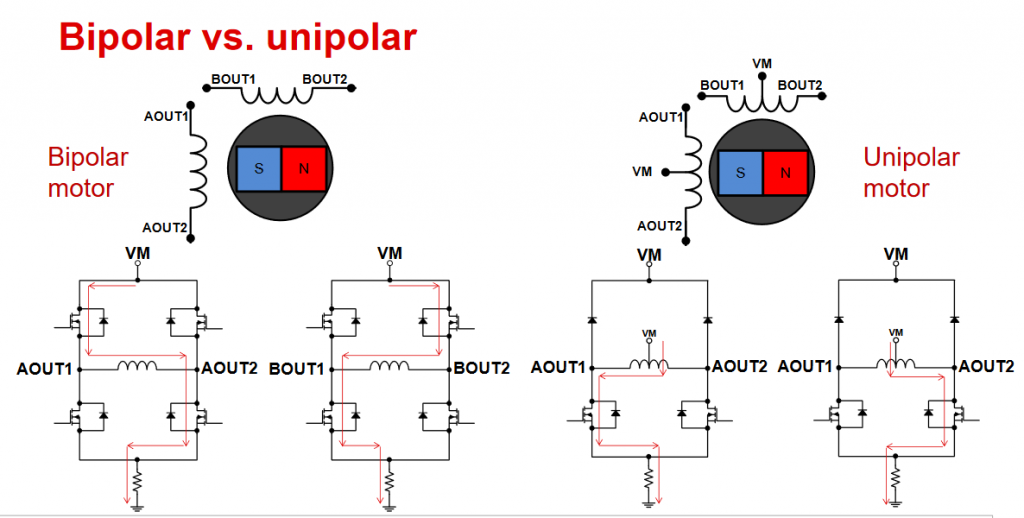
Shematski prikaz glavnih razlik med unipolarnimi in bipolarnimi koračnimi motorji (VIR 1)
Prednosti in slabosti obeh vrst
- Bipolarni motorji so na splošno boljši od unipolarnih motorjev. Imajo večji navor in so bolj učinkoviti. Vendar pa so bolj zapleteni za pogon, ker potrebujejo povratni tok.
- Bipolarni motorji imajo po konstrukciji več (vsaj dva) neodvisna navitja. Iz vsakega konca navitja izhaja žica, tako da prideta dve žici na navitje.
- Unipolarni motorji imajo tudi več navitij, vendar je poleg tega, da so konci vsakega navitja povezani z žicami, sredina povezana tudi s tretjo žico. Odsotnost te tretje žice pomeni, da so bipolarni motorji nekoliko enostavnejši za izdelavo.
- Ko gre za pogon teh motorjev, pa preprostejši bipolarni motor zahteva bolj zapleten gonilnik. To je zato, ker moramo za natančno nadzorovanje njegovega gibanja biti sposobni poganjati tok v vsakem navitju v obe smeri.
- Po drugi strani pa se pri unipolarnem motorju lahko izognemo toku, ki teče samo v eno smer. To pomeni, da je elektroniko voznika mogoče poenostaviti. Kompromis je v tem, da v določenem trenutku uporabimo le polovico vsake tuljave navitja, kar pomeni nižji navor in učinkovitost.
- Vendar pa je danes z enostavnim dostopom do gonilnikov motorjev, kot so H mostovi, enostavno poganjati bipolarne motorje z izmeničnim tokom. Prednost unipolarnih motorjev, da ne potrebujejo povratnega toka, ni več tako pomembna.
VIR (1) EE world online